2015年2月20日 ロボット目線に基づく新たな位置認識システムを開発
ロボット目線に基づく新たな位置認識システムを開発
~未知環境でも自律的な行動可能なロボットの誕生に期待~
国立大学法人東京農工大学大学院工学研究院先端機械システム部門の水内郁夫准教授と工学府機械システム工学専攻大学院生の市村彰啓は、ロボットの使用する地図表現を従来の座標系(xyz値)で「位置」を表現する方法から、ロボットからの「見え方」に基づいて「位置」を表現する新たなコンセプトによる地図方式の開発を進めています。本研究は、日立製作所との共同研究により実施しました。
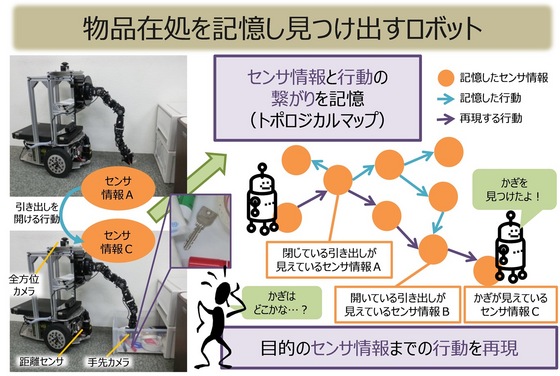
具体的には、新コンセプトの地図方式を採用すると、開いている引き出しの前と閉まっている引き出しの前の場合、従来の座標系では同じ「位置」と識別されますが、両者を別の「位置」として認識させることができるようになります。実証研究を重ね、将来的には、個々の環境において各種情報をロボットに事前学習させることなく、未知環境で目標とする移動と家具など物の操作等を統合的に実行するシステムの開発を目指しています。
現状:一般的に、ロボットは座標系に基づいて現在位置を認識する自己位置推定を行い、目標の位置まで移動する。そのため、家具など物の操作を実行させる場合には、家具のモデル(どこを持つ・どこを軸に回る・どの部分が平行移動する、など)を事前に与えて、ロボットはそのモデルに基づいて操作を実行する。したがって、エレベータの開閉ボタンや取手を動かして開閉する扉などは、その都度、その行動のモデルを作成し、記憶させることが必要であり、予め情報を与えられていない未知の環境では、ロボットは物を操作することができなかった。
研究成果:ロボットの各種センサの状態を「見え方」(=多次元ベクトル)として表現することで、見覚えのある状況か否かを判定する。見覚えのある状況を「ノード」と呼び、連続して経験した2つのノードを結ぶ「アーク」は、そのノード間を「移動」
(注1)
するためにロボットが行った行動を記憶している。地図は多くのノードとアークから成り
(注2)
、「目的地」
(注3)
とするノードを指定すると、「現在地」
(注3)
から目的地までたどり着くアークを探索して「移動」する。なお、ロボットには上向きと下向きの2種類の全方位カメラ(魚眼カメラ)が設置され、レーザ距離計も設置されている。このような方式に基づく地図作成により、従来の移動と操作を統合して予め地図に取り入れることができるライブラリ(ソフトウェア部品)を開発した。
これによって、グリッパ付き7自由度アームを搭載した車輪移動ロボットは、「引き出しの中が見えている状態」等を「目的地」として設定すると、家庭内を自律的に移動し特定の引き出しを開けて中が見える状態まで「移動」することができるようになった。
今後の展開:この成果は、家庭内の物品探索をはじめ、会議室の椅子等の整列・倉庫の管理・病院やオフィス内のエレベータ等を含む自律移動など様々な場で、これまで不可能とされてきたロボットによる自律的なモノの操作と目標位置への行動を統合的に可能にするための基本フレームワークとしての利用が期待される。今後は、水内研究室内をはじめとする他のロボットのシステムにおいて、今回開発したライブラリを用いて環境操作
(注4)
を含む動作・行動に利用し、さらなる実証研究を進めてゆく。将来的には外部へのライセンス提供も検討する。
(注1)本来物理的な座標が変化することを「移動」と呼ぶが、本研究ではアームを操作することも「移動」に含める。
(注2)ノードとアークから成る形態の地図は「トポロジカルマップ」と呼ばれる。
(注3)本来物理的な座標を指して「目的地」「現在地」と呼ぶが、本研究では「ロボットからどう見えているか」を指して「目的地」「現在地」と呼ぶ。
(注4)ここでは、「ドアを開ける」「椅子をどかす」「踏み台を運ぶ」などの、自らが移動すること以外の、周囲の環境を変化させるような行動のことを、環境操作と呼ぶ。