The more confused the brain, the more accurately the body begins to move - The body's filter function that puts "uncertainty" on its side -
The more confused the brain, the more accurately the body begins to move
-The body's filter function that put "uncertainty" on its side-
"You never know when the cannon will sound" - Humans are not good at such uncertain situations, and their reactions tend to be varied. However, Assistant Professor Tsubasa Wakatsuki (Division of Advanced Health Science, Institute of Engineering, Tokyo University of Agriculture and Technology) and Professor Norimasa Yamada (School of Health and Sport Sciences, Chukyo University) have succeeded in capturing the phenomenon of the action of reaching for a target in an extremely simple experiment, in which the variation in response decreases when temporal uncertainty increases, that is, the body adapts flexibly. This phenomenon is consistent with the "morphological computation" that is attracting attention in robotics, the idea that the mechanical properties of the body take over some of the information processing, and suggests that the human body may act like a "filter that removes out temporal noise." This research is expected to be an opportunity for us humans to rethink the true greatness of human beings from the perspective of "Embodied Intelligence" in today's rapidly developing robotics and AI.
The results of this research were published in Frontiers in Robotics and AI (February 10).
Title: Entropy-dependent human motor modulation consistent with morphological computation in a single subject
URL:https://www.frontiersin.org/journals/robotics-and-ai/articles/10.3389/frobt.2026.1734848/full
Background
Imagine the 100m run final and start scene of the Olympics. At the signal of "set", the players raise their hips, and a moment of silence comes to the stadium. However, the time from there to the sound of the cannon is actually not mechanically determined, but is left to the arrangement of the starter. The starter watches the moment when everyone rises and stands still without moving at all, and fires a cannon to break the tense silence. In other words, players cannot know in advance how many seconds it will ring, and in an uncertain situation where they don't know when it will ring, they will sharpen their nerves in that moment. In these "unpredictable situations", it is difficult for top athletes who have repeated the start practice thousands of times to keep their brains constantly prepared. Therefore, conventional wisdom in psychology and sports science has believed that the more uncertainty there is, the more unstable performance will be.
Assistant Professor Tsubasa Wakatsuki (Division of Advanced Health Science, Institute of Engineering, Tokyo University of Agriculture and Technology) and Professor Norimasa Yamada (School of Health and Sport Sciences, Chukyo University) have been attracting attention in the field of robotics in recent years. This is the idea that the physical characteristics of the hardware (in the case of humans, the body), such as the weight of the arms and the softness of the joints, take over some of the information processing, rather than the software (in the case of humans, the brain) does not perform all the complex information processing related to movement. This research group thought, "If humans are also equipped with this form of morphological calculation, by using the 'complex and heavy body' that humans inherently have, the body itself acts like a 'filter' that filters out temporal noise (uncertainty) and covers the limits of the brain." To test this question, we conducted a very simple experiment comparing the action of pressing a button with the fingertips (less-embodiment) and the action of reaching the hand using the whole arm (high-embodiment).
Research Structure
This study was conducted by Assistant Professor Tsubasa Wakatsuki (Division of Advanced Health Science, Institute of Engineering, Tokyo University of Agriculture and Technology) and Professor Norimasa Yamada (School of Health and Sport Sciences, Chukyo University).
Research Results
To measure reaction time under temporal uncertainty, we used the fore-period paradigm, a classic psychological experimental method. In this paradigm, the response task consists of two types of stimuli, the pre-stimulus and the main stimulus, and the interval between these stimuli (foreperiod) is manipulated to create an uncertain situation (Fig. 1A). In doing so, uncertainty can be strictly quantified by a measure of information theory called "entropy Note 2".
This response task was compared with the conventional method of pressing buttons with the fingers (low-embodiment) and reaching for the target presented on the screen (high-embodiment) (Fig. 1B). Since the button press action only moves the fingertips slightly, the reaction is mainly expressed as "brain (software) control". On the other hand, in the stretching motion, the "mechanical properties of the body (hardware)" such as the mass of the arm, the softness of the joints, and the viscoelasticity of the muscles are greatly involved, and it is thought that there is more room for temporal noise to be absorbed and stabilized.
1. Stabilization of reaction time: Increasing temporal uncertainty reduces reaction variability
If the response is operated only by the nervous system (mainly the brain and software in robots), the higher the temporal uncertainty (entropy), the higher the burden on the nervous system, the more unstable the reaction time, and the greater the variability (coefficient of variation: CV). However, in this study, we confirmed that the higher the entropy, the lower the CV of reaction time in the reaching (high-embodiment) movement (Fig. 2A). On the other hand, no decrease in CV was seen in the button push (low-embodiment) movement, suggesting that it is a specific adaptation to the reach movement. The results indicate that the mechanical properties of the arm may "filter" temporal noise and stabilize the response. In other words, it can be said that we have captured a phenomenon consistent with morphological calculations in robotics.
2. Understanding the temporal context: Selecting a response mode according to the situation.
Foreperiod means so-called "waiting time". In this study, the relationship between the length of the foreperiod and the reaction time was shown to be completely different between the push of the button and the action of reaching (Fig. 2B). According to previous studies, if the foreperiod is short, the response will be delayed because it reacts in a hurry, and conversely, if it is long, it will be easier to predict the timing of the main stimulation and the response will be faster. This trend was reproduced in the push of the button, but the exact opposite trend appeared in the action of reaching the hand. This result suggests that even with the same "response", the way of preparing and performing may change depending on the situation. In other words, it actively acquires information in the temporal context, such as "how long you waited", and indicates that you may be reacting while incorporating that information into the exercise program, which is different from the passive response of the button press action.
Future developments
Through the lens of morphological computation, which is a concept of robotics, this research has discovered new possibilities for motor control in which the human body absorbs uncertainty and stabilizes responses. In the future, by combining the analysis of muscle and brain activity and movement, we will clarify how the body's passive characteristics and active coordination (e.g., muscle co-contraction and impedance control) are divided. In addition, the nature of changing response patterns based on understanding context (uncertainty) is an important feature that humans are good at, at least for now, and if this can be implemented in robots, it could lead to robot designs that adapt to the environment more humanly. In this way, in today's world where robotics, AI, and brain science are rapidly developing, this research is expected to be an opportunity to re-examine the true greatness of human beings from the perspective of "Embodied Intelligence" by experimentally demonstrating that the body is not just an effect tool for expressing intentions (in the case of this study, reacting) to the outside world. In addition, experimental psychology has emphasized abstract movements as much as possible, such as pressing buttons, in order to manifest the object to be observed, but this study shows that "intentionally introducing embodiment" can also be an effective method, suggesting the importance of deliberately incorporating physicality depending on the purpose of the research.
Glossary
Note 1) Morphological Computation
In robotics, the idea is that the form of hardware partially shoulders the burden of calculations in software. For example, it is known that when a stream of water is applied to a dead fish, it begins to move as if it were alive. In other words, it can be interpreted that the shape of the fish, such as scales and fins, is equipped with a calculation function for swimming. In this study, it can be said that the body shape, such as the mass of the arms and the softness of the joints, may reduce the variation in responses in uncertain situations and take on some of the burden of brain control.
Note 2) Entropy
In information theory, it is a measure that quantitatively expresses "ambiguity" and "clutter". It is calculated by the number of choices in the source and its probability, expressed in bits. Therefore, in this study, where the type of four-period (number of choices) was four, the minimum 0-bit condition was the condition in which 1.0 seconds was selected, and the maximum 2-bit condition was the condition in which four four-period periods were selected with equal probability (25% each). During this time, by manipulating probability, we also achieved 1.0-bit and 1.5-bit conditions.
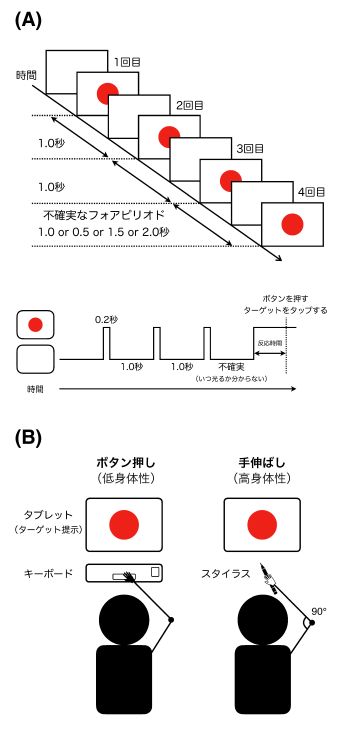
Figure 1: Image of the experiment
(A) Conceptual diagram of the foreperiod paradigm. A circular target is presented on the tablet four times, reacting as quickly as possible to the fourth target. The time interval for the 1st-2nd and 2nd-3rd sessions is uniform at 1.0 seconds, while the 3rd-4th session (before period) is selected from 4 types. The number of types of foreperiod and their probability of occurrence determine the uncertainty (entropy) (based on Figure 1A from Wakatsuki & Yamada, 2026). (B) Two reactive actions reflecting differences in physicality. The button press is a movement that minimizes the influence of the body and makes it easier to see "brain timing control" (low-embodiment), while the hand stretching action is adopted as a moderately simplified movement (high-embodiment) that actively includes "mechanical characteristics of the body" such as the mass of the arm and the softness of the joints (created based on Figure 1B of Wakatsuki & Yamada, 2026).
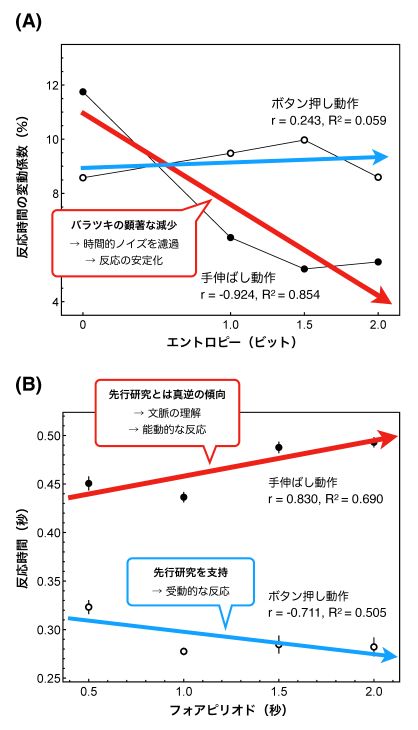
Figure 2: Adaptation to temporal uncertainty: stabilizing responses and understanding context
(A) Relationship between temporal uncertainty (entropy) and variation in reaction time (coefficient of variation: CV). While there was no clear decrease in CV in button press (low-embodiment), higher entropy was associated with lower CV and a tendency to stabilize reaction time in reaching (high-embodiment) (based on Figure 2B from Wakatsuki & Yamada, 2026). This suggests that the body may act like a "filter that removes out temporal noise". (B) Relationship between waiting time (before period) and reaction time. For button pressing, the longer the four-period, the shorter the reaction time, which supported previous research, but the exact opposite trend was shown for hand reaching, suggesting that the response mode may differ depending on the difference in physicality (based on Figure 3A in Wakatsuki & Yamada, 2026).
◆Inquiries about research◆
Division of Advanced Health Science, Institute of Engineering, Tokyo University of Agriculture and Technology Graduate
Assistant Professor
Tsubasa Wakatsuki
TEL/FAX:042-388-7969
E-mail: twakatsuki (please put @ here)go.tuat.ac.jp
◆Inquiries about the press◆
Public Relations Office, General Affairs Office, Tokyo University of Agriculture and Technology
TEL:042-367-5930
E-mail: koho2 (please put @ here)cc.tuat.ac.jp
Related links (opens in a new window)
- Tokyo University of Agriculture and Technology Assistant Professor Tsubasa Wakatsuki Researcher Profile
- Tokyo University of Agriculture and Technology Assistant Professor Tsubasa Wakatsuki Laboratory Website
- Assistant Professor Tsubasa Wakatsuki belongs to Tokyo University of Agriculture and Technology Faculty of Engineering Department of Mechanical Systems Engineering