脳が混乱するほど、身体は正確に動き出す −“不確実さ”を味方につける、身体のフィルタ機能−
脳が混乱するほど、身体は正確に動き出す
−“不確実さ”を味方につける、身体のフィルタ機能−
「号砲がいつ鳴るかわからない」──人間はそんな不確実な状況を苦手としており、反応はバラつくと思われがちです。ところが、国立大学法人東京農工大学大学院工学研究院先端健康科学部門の若月翼助教と中京大学スポーツ科学部の山田憲政教授は、ターゲットに手を伸ばす動作では、時間的な不確実さが大きくなると反応のバラツキが小さくなる、つまり身体が柔軟に適応する現象を極めてシンプルな実験で捉えることに成功しました。この現象は、ロボット工学で注目される「形態計算(Morphological Computation)」──身体の力学的特性が情報処理の一部を肩代わりするという考え方──と整合的であり、人間の身体が“時間的なノイズを濾過するフィルタ”のように働く可能性を示唆します。本研究は、ロボット工学やAIの発展が急激に進む現代において、「身体そのものがもつ知性(Embodied Intelligence)」という視点から、我々人間に、人間の真の凄みを改めて考えさせるきっかけになることが期待されます。
本研究成果は、Frontiers in Robotics and AI(2月10日付)に掲載されました。
論文タイトル:Entropy-dependent human motor modulation consistent with morphological computation in a single subject
URL:https://www.frontiersin.org/journals/robotics-and-ai/articles/10.3389/frobt.2026.1734848/full
背景
オリンピックの100m走決勝、スタートの場面を想像してみてください。「セット」の合図で選手たちは腰を上げ、スタジアムに一瞬の静寂が訪れます。しかし、そこから号砲が鳴るまでの時間は、実は機械的に決まっているわけではなく、スターターの采配に委ねられています。スターターは、全員が腰を上げ、微動だにせず静止したその一瞬を見計らって、張り詰めた静寂を破る号砲を鳴らします。つまり、選手は「あと何秒後に鳴るか」を事前に知ることはできず、いつ鳴るか分からない不確実な状況の中で、その一瞬に全神経を研ぎ澄ますことになります。こうした「予測できない状況」では、スタート練習を数千回も繰り返したトップアスリートであっても、脳の準備状態を一定に保つことは困難です。そのため、これまでの心理学やスポーツ科学の常識では、不確実性が増せば増すほど、パフォーマンスは不安定になると考えられてきました。
東京農工大学大学院工学研究院先端健康科学部門の若月翼助教と中京大学スポーツ科学部の山田憲政教授は、近年ロボティクス分野で注目されている“形態計算(Morphological Computation)注1”という概念にこの常識を打破する糸口を見出しました。これは、運動に関する複雑な情報処理をすべてソフトウェア(人間であれば、脳)が行うのではなく、腕の重さや関節の柔らかさといったハードウェア(人間であれば、身体)の物理的特性が情報処理の一部を肩代わりするという考え方です。本研究グループは、「もしこの形態計算が人間にも備わっているならば、人間が本来持っている“複雑で重たい身体”を使うことで、身体そのものが時間的なノイズ(不確実さ)を濾過する“フィルタ”のように働き、脳の限界をカバーするのではないか?」と考えました。そしてこの問いを検証するため、指先でボタンを押す(身体性の低い)動作と腕全体を使う(身体性の高い)手伸ばし動作を比較する、極めてシンプルな実験を行いました。
研究体制
本研究は、東京農工大学大学院工学研究院先端健康科学部門の若月翼助教と中京大学スポーツ科学部の山田憲政教授によって実施されました。
研究成果
時間的な不確実下での反応時間を計測するため、古典的な心理学実験手法であるフォアピリオド・パラダイムを用いました。このパラダイムでは反応課題が予備刺激と本刺激の2種類の刺激で構成され、これら刺激の間隔(フォアピリオド)を操作することで不確実な状況を作り出します(図1A)。その際、不確実さは“エントロピー注2”と呼ばれる情報理論の尺度により、厳密に定量化できます。
この反応課題を、従来手法である手指でのボタン押し動作(低身体性)と画面提示されるターゲットへの手伸ばし動作(高身体性)で実施し、比較しました(図1B)。ボタン押し動作は指先を少し動かすだけなので、反応が主に“脳(ソフトウェア)の制御”として表れます。これに対し、手伸ばし動作では、腕の質量や関節の柔らかさ、筋の粘弾性など“身体(ハードウェア)の力学的特性”が大きく関わり、時間的なノイズを吸収し、安定化できる余地が増えると考えられます。
1. 反応時間の安定化─時間的な不確実さが増大すると反応のバラツキが減少する─
反応が神経系(主に脳、ロボットにおけるソフトウェア)だけで作動しているならば、時間的不確実性(エントロピー)が高いほど神経系の負担が増加して反応時間は不安定になり、バラツキ(変動係数:CV)が増大すると考えられます。しかし本研究では、手伸ばし(高身体性)動作において、エントロピーが高いほど反応時間のCVが低下するという直感に反する結果が確認されました(図2A)。一方、ボタン押し(低身体性)動作ではCVの低下は見られず、到達動作に特有の適応であることが示唆されました。この結果は、腕部の力学的特性が、時間的なノイズを“濾過”し、反応を安定化させる可能性を示しています。つまり、ロボティクスにおける形態計算と整合的な現象を捉えたと言えます。
2.時間的な文脈の理解─状況に応じた反応様式の選択─
フォアピリオドは、いわゆる“待ち時間”を意味します。本研究では、このフォアピリオドの長さと反応時間の関係が、ボタン押し動作と手伸ばし動作で全く異なる結果が示されました(図2B)。これまでの研究によれば、フォアピリオドが短いと慌てて反応するため反応が遅れ、逆に長いと本刺激のタイミングを見込みやすくなり、反応は速くなるとされています。ボタン押しではこの傾向が再現されましたが、手伸ばし動作ではそれとは真逆の傾向が現れました。この結果は、同じ“反応”でも、高い身体を伴う動作では状況に応じて準備や実行の仕方が切り替わる可能性を示唆しています。つまり、「どれくらい待ったか」といった時間的な文脈に関する情報を能動的に獲得し、その情報を運動プログラムに取り込みながら反応している可能性を示すものであり、ボタン押し動作による受動的な反応と一線を画します。
今後の展開
本研究は、ロボティクスの概念である形態計算というレンズを通すことで、人間の身体が不確実性を吸収して反応を安定化させる運動制御の新たな可能性を見出しました。今後は、筋や脳の活動、動きの分析を組み合わせることで、身体の受動的特性と能動的な調整(筋の共収縮・インピーダンス制御など)がどのように分担しているのかを明らかにします。さらに、文脈(不確実性)を理解したうえで反応様式が変化するという性質は、少なくとも現時点では人間が得意とする重要な特徴であり、これをロボットに実装できれば、より人間らしく環境に適応するロボット設計につながる可能性があります。このように、ロボット工学やAI、脳科学の発展が急速に進む現代において、本研究は身体が意図を外部に表出(本研究であれば、反応)するための単なる効果器ではないことを実験的に示すことで「身体そのものがもつ知性(Embodied Intelligence)」という視点から、人間の真の凄みを改めて捉え直すきっかけになることも期待されます。加えて、実験心理学では観察したい対象を顕在化するために、ボタン押しなどなるべく抽象化された動きが重視されてきましたが、本研究は「身体性を意図的に導入すること」もまた有効な方法になり得ることを示しており、研究目的によっては身体性をあえて取り入れることの重要性を示唆します。
用語解説
注1) 形態計算(Morphological Computation)
ロボット工学において、ハードウェアの形態がソフトウェアにおける計算の負担を一部肩代わりする考え方。例えば、死んだ魚に水流を当てると、あたかも生きているかのように動き出すことが知られています。つまり、ウロコやヒレといった魚の形状そのものに泳ぐための計算機能が備わっていると解釈できます。本研究に置き換えると、腕の質量や関節の柔らかさといった身体の形態が、時間的に不確実な状況で反応のバラツキを抑え、脳の制御負担を一部肩代わりしている可能性を示したと言えます。
注2) エントロピー
情報理論において、“曖昧さ”や“乱雑さ”を定量的に表す尺度。情報源の選択肢数とその確率によって計算され、ビットという単位で表されます。したがって、フォアピリオドの種類(選択肢数)が4であった本研究では、最小0ビット条件は確実に1.0秒が選ばれる条件であり、最大2ビット条件は4つのフォアピリオドが等確率(25%ずつ)で選ばれる条件となります。この間、確率を操作することで、1.0ビット条件と1.5ビット条件も実現しました。
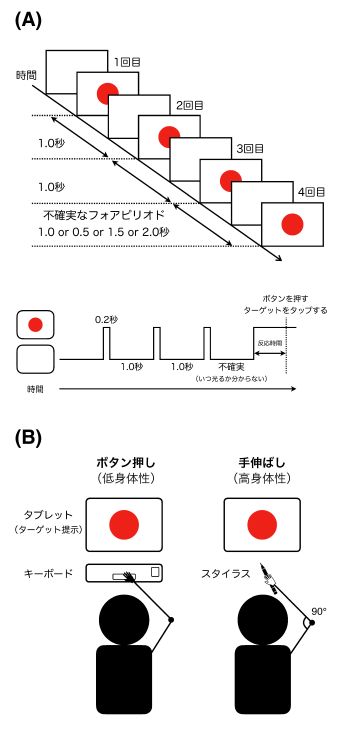
図1:実験のイメージ
(A)フォアピリオド・パラダイムの概念図。タブレット上に円形のターゲットが4回提示され、4回目のターゲットにできるだけ速く反応します。1-2回目、2-3回目の時間間隔は1.0秒で統一されますが、3-4回目(フォアピリオド)は4種類から選ばれます。フォアピリオドの種類の数とその出現確率によって、不確実さ(エントロピー)が決定されます(Wakatsuki & Yamada, 2026の図1Aを基に作成)。(B)身体性の違いを反映する2つの反応動作。ボタン押しは身体の影響を最小化して“脳のタイミング制御”を見やすくした動作(低身体性)であり、手伸ばし動作は腕の質量や関節の柔らかさなど“身体の力学的特性”を積極的に含めかつ適度に単純化された動作(高身体性)として採用しました(Wakatsuki & Yamada, 2026の図1Bを基に作成)。
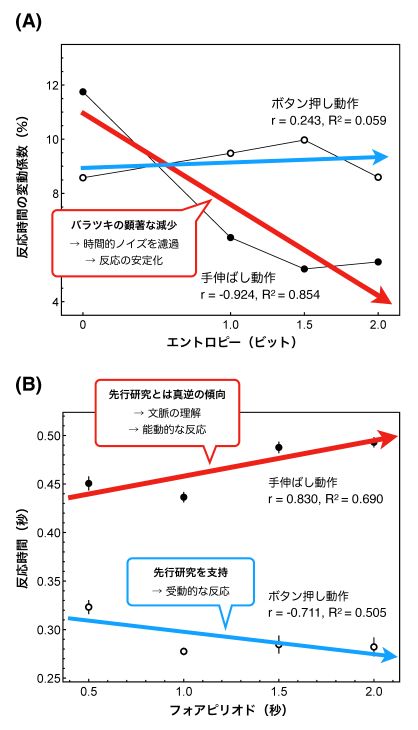
図2:時間的不確実性への適応─反応の安定化と文脈の理解─
(A)時間的不確実性(エントロピー)と反応時間のバラツキ(変動係数:CV)の関係。ボタン押し(低身体性)ではCVの明確な低下は見られない一方、手伸ばし(高身体性)ではエントロピーが高いほどCVが低下し、反応時間が安定する傾向が示されました(Wakatsuki & Yamada, 2026の図2Bを基に作成)。これは身体が“時間的なノイズを濾過するフィルタ”のような働きをしている可能性を示唆しています。(B)待ち時間(フォアピリオド)と反応時間の関係。ボタン押しでは、フォアピリオドが長いほど反応時間が短くなり先行研究を支持しましたが、手伸ばしでは真逆の傾向が示され、身体性の違いによって反応様式が異なる可能性が示唆されました(Wakatsuki & Yamada, 2026の図3Aを基に作成)。
◆研究に関する問い合わせ◆
東京農工大学大学院工学研究院
先端健康科学部門 助教
若月 翼(わかつき つばさ)
TEL/FAX:042-388-7969
E-mail:twakatsuki(ここに@を入れてください)go.tuat.ac.jp
◆報道に関する問い合わせ◆
東京農工大学 総務課広報室
TEL:042-367-5930
E-mail:koho2(ここに@を入れてください)cc.tuat.ac.jp