予防安全装置の開発 (Active Safety Devices Development)
予防安全装置の開発 (Active Safety Devices Development)
 超小型電気自動車の特徴を利用した運転支援システムの研究
超小型電気自動車の特徴を利用した運転支援システムの研究
Study on Driver Assistance System Design by Utilizing Features of Electric Vehicle
近年日本では,交通事故死者数が年間8,000〜10,000人前後で推移しており,交通事故件数は年間100万件程度で
増加傾向を示している.そのため,事故を未然に防ぐ技術として予防安全技術(Active Safety)は今後必要不可欠で
あり,電子制御技術やITS (Intelligent Transport Systems) 技術を使った先端制御技術が中心的な役割を果たす.
本技術では,一人乗り電気自動車を使って,操作系をすべて電子化するX-バイワイヤ(X-by-Wire)車両を製作し,自
動車の基本運動性能(走る,止まる,曲がる性能)を向上させ、運転者に優しい次世代操作支援技術を提供する.
電気自動車の駆動源である電動モータは以下の特徴を持つため,新しいビークルダイナミックスの制御系設計に
適している.
■ ペダルから駆動トルクまでの応答性が良いこと.
■ 電流を測定することで駆動トルクが容易に測定できることとトルクを正確に制御できること.
■ 小型で高出力, タイヤに設置可能で,“インホイールモータ(In-wheel-motor)”による分散配置が可能であること
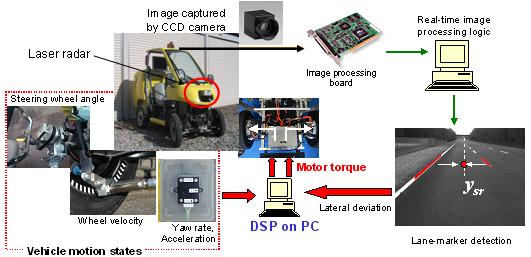
永井研究室では,これまで,車載カメラによる前方映像情報に基づき,電気自動車の左右独立駆動モータを用いた
レーンキープ制御で(直接ヨーモーメント入力),直線路・曲線路における車線追従走行を実現し,先行車との車間距離を
レーザレーダ(Laser Rangefinder)で測定し,その情報を駆動モータにフィードバックすることにより,安全な車間距離を
保つ制御システムの実験を行っている.
RESEARCH ABSTRACT
This research focuses on vehicle dynamics control applications on micro-scale electric vehicle for
enhancing its active safety. The use of in-wheel-motor control in various control objectives as active
safety devices are studied. The control systems for enhancing vehicle dynamics such as direct yaw moment
control for side slip prevention and active front steering for handling by using steer-by-wire mechanism
are studied. Moreover, external sensing systems are integrated to synthesize driver assistance systems,
e.g. lane keeping assist system, and adaptive cruise control system.
 戻る
戻る