自動車の運動性能向上技術 (Vehicle Dynamics and Control)
自動車の運動性能向上技術 (Vehicle Dynamics and Control)
 車線変更行動改善のための個別適合型リアルタイム支援システムの開発
車線変更行動改善のための個別適合型リアルタイム支援システムの開発
Development of Individual Adaptive Real-Time Assistance System for Improvement of Lane Change Behavior
車線変更は,初心者ドライバが苦手とし,またヒヤリハットが頻繁におこる行動であるため,そのときのドライバの運転行動をリアルタイムで評価し,走行環境や運転スキルに応じて助言や支援を行うシステムが必要あると考えられます.
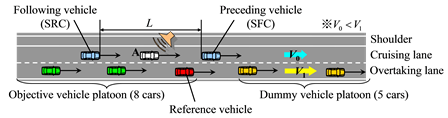
本研究室では,自動車教習所などでの車線変更行動の教育を目的とし,ドライバの運転操作状況や周辺映像の記録が可能な常時記録型ドライブレコーダで収集した高速道路での走行データを用い,
任意の走行環境を模擬できるドライビングシミュレータ環境下にて,特定の走行環境における規範運転操作モデルと個別適合型リアルタイム支援システムを開発しています.
RESEARCH ABSTRACT
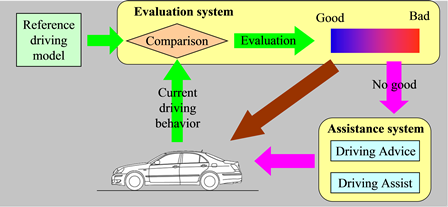
We propose a reference driving maneuver and real-time assistance system for improvement of lane change behaviour by using driving simulator.
To construct reference driving model, driving data is acquired through experiment by using real vehicle on highway and by using driving simulator
which is installed the lane change scenarios that have been reconstructed based on the experimental result.
And the individual adaptive real-time assistance system is constructed based on the reference driving model and the kind of assist depending on driving skill and driving situation.
 戻る
戻る